
目錄表
國立屏東大學 即時與嵌入式系統實驗室
Xenomai
Prerequisite
在學習Xenomai前應具備基礎以上的作業系統知識、平行運算(Parallel Computing),及緒程式設計(Threading Programming),可先參考以下連結:
Parallel Computing
PThreads Programming
General Overview
Xenomai專案是讓Linux作業系統提供即時性的多種嘗試之一,相較於原本的Kernel,Xenomai在處理搶先(Preemption)時可以滿足更為嚴格的回應時間(Response Time)需求。具體來說,Xenomai為Linux系統新增了一個新的內核來專責處理具有時間要求的即時工作,並使用既有的內核來處理其它的工作,我們將這種運作方式稱為雙內核架構(Dual Kernel Architecture)。在此架構下,既有的內核與新增的內核各自執行它們所負責的工作,但新增的內核將以高於既有內核的優先權運行。
Xenomai 3有兩種不同的組態:
- 雙內核(Dual Core,Codename Cobalt):Xenomai實作了一個稱為Cobalt的內核,並與Linux原有的內核形成一個具有雙內核(Dual Kernel)的系統。在運行時Cobalt(負責接收處理所有來自硬體的搶先)將原有的內核視為一個閒置工作(Idle Process),等到Cobalt沒有事情需要處理時,才會改由Linux原有的內核接手處理。如此可以讓「搶先(Preemption)」更有快速地被處理。
How to pronounce Xenomai? Xenomai有三個音節,分別是Xe no mai,可唸做「ㄌㄟ」.「ㄋㄡ」.「ㄇㄞˇ」)
關於以上的兩種實作,Huang等人3) 已經實驗驗證了雙內核的Cobalt效能優於單內核的Mercury.
雙內核/Cobalt
Cobalt是和Linux原有的內核共同運行的一個內核。當系統以這種雙內核(Dual Kernel)方式運行時,Cobalt負責所有時間攸關的工作4),例如中斷處理、即時執行緒(real-time threads)的排程等;其餘的工作則由原本的Linux內核加以執行。當然,從系統整體的角度來看,由Cobalt所負責的工作將會以較高的優先權執行,而由Linux原內核所執行的工作之優先權則相對較低。Xenomai還提供了實作在libcobalt函式庫的RTOS API,呼叫它們就可以透過Cobalt內核來進行具有即時性5)的操作,其中包括了Xenomai 3所實作的部份POSIX 1003.1c服務。
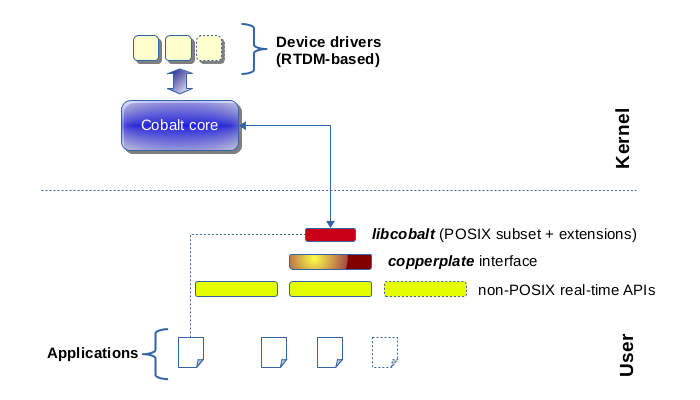
在figure 1左上方的device drivers(裝置驅動程式)是指依據Xenomai所實作的Real-Time Driver Model(RTDM,即時驅動程式模型)6)7),使用者模式(User Mode)的應用程式(User Applications)可以透過對libcobalt裡的API呼叫,來經由Colblt內核存取(操作)這些裝置驅動程式。值得一提的是,在libcobalt裡的API只是POSIX 1003.1c一部份的實作,若是在應用程式裡要使用非POSIX 1003所定義的即時操作(換句話說,進行非POSIX的即時呼叫),則是透過cooperplate介面來進行對應。
Xenomai 3使用Optimistic interrupt protection 機制減少 中斷遮罩(Interrupt Mask)的使用?(changing the interrupt mask) – 一般的做法在每次進入critical section時都要中斷遮罩(interrupt mask),而Optimistic interrupt protection可以不用;因此Xenomai可以有效減低latency(因為Latency很大因素就是來自於interrupt handling。
單內核/Mercury
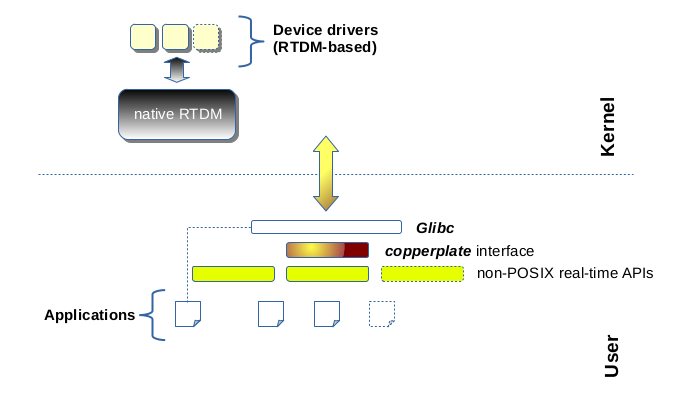
Mercury使用PREEMPT-RT Patch讓Linux系統原有的內核能夠運行即時工作。相較於Cobalt,Mercury是一個單內核的解決方案。通常應用程式若要進行即時的操作,必須先確保Linux內核有啟動(Enable)PPEEMPT-RT,不過視應用程式對即時性要求的不同,若是有比較寬鬆的回應時間(Responsiveness)或是較大的完成時間(Jitter)要求等(甚至是可以允許一並比例的工作錯失截限時間),有時也可以沒有PREEMPT-RT的情況下執行。
在Mercury這種單內核的組態下,所有Xenomai 3所提供的非POSIX的API都有在原本的執行緒函式庫(包含NPTL以及傳統的linuxthreads)進行精準的模擬。
Xenomai在Mercury這種單內核的組態下,所提供的所有非POSIX的API都在可以在原生的執行緒函式庫(包含NPTL以及傳統的linuxthreads)得到精確的??
In this single kernel configuration, all the non-POSIX RTOS APIs Xenomai 3 provides are accurately emulated over the native threading library (preferably NPTL, but also supports linuxthreads for legacy setups).
如何選擇適合的Xenomai組態
若是應用程式對於即時性的要求並沒有太嚴格,且能夠接受在不具即時性的內核上執行RTOS API、以及高延遲的搶先處理(也就是Linux原本的CONFIG_PREEMPT),那麼就適合使用Xenomai 3的Mercury單內核組態 — 因為比起原始的Linux的系統,Mercury讓應用程式在執行上更能滿足時間要求(也就是能夠比起原本的Linux系統更好,或者反過來說,至少不會更糟)。
但是當應用程式對於即時性的要求較高時,Mercury可能就不適合。
一個名為Dovetail的機制(Kernel軟體層),用以將所有關鍵的事件送到延伸的第二內核(dual kernel extension core)
同步方法的比較
雙內核組態採用了簡單的鎖定方法,在即時活動(意即工作)同時在不超過4個CPU核心上運行時,此組態通常會有較好的表現。反之,當即時工作在超過4個以上的CPU核心上執行時,雙內核組態的效能較差。至於當即時工作在超過4個CPU核心上執行時,單內核組態能夠得到更好的效能表現。
更具體來說,Xenomai在幾個CPU核心上執行並不是效能的關鍵,即時工作同時在多少個CPU核心上執行,且接收來自即時工作的中斷才是影響效能的關鍵。
至於Xenomai 4則使用了一個(不同於Xenomai 3的)同步方法,採用16-way server pinning,在使用超過4個CPU核心時,仍能提供良好的效能表現。
Xenomai API
Xenomai的API包含了一部份(基礎)的POSIX API,以及一些非POSIX的API — 不過Xenomai只有實作部份的POSIX API(實作在libcobalt函式庫裡)。至於非POSIX的API則是實作於libcobalt之上,我們可以透過copperplate介面加以呼叫。
以下為POSIX所定義的API及Xenomai所實作的部份API:
除了POSIX介面的API以外,Xenomai還有以下的API:
Cobalt的更多細節
ADEOS
Cobalt之所以能和linux原本的內核形成雙內核的運作方式,是得利於Adeos(Adaptive Domain Environment for Operating System)
Adeos是2001年,由Karim Yaghmour所設想的 8)
其後於2002年,更進一步探討了在SMP環境下的實作議題 9)
這些想法後來由Philippe Gerum進行實作,但在實際的做法上,與原始的設想有些差異。 2005年6月,Philippe Gerum發表了Adeos裡用於在兩個內核間共享中斷的I-pipe核心機制. 10)
2000年,Karim发表了一篇名为《操作系统的自适应域环境》的论文(即Adeos,Adaptive Domain Environment of Operating System),该论文描述了一种简单而智能的方案,用于在同一系统上运行的多个内核之间共享公共硬件资源。他通过“pipeline”抽象来说明在x86硬件上共享中断的基本机制,根据整个系统给定的优先级,依次向每个内核传入中断。他倡导一种对硬件中断进行优先级排序的新方法,以便可以开发基于Linux内核的实时扩展,而无需使用当时已被某些专有RTOS供应商申请授予专利方法(这里的RTOS供应商和专利指的就是WindRiver和RTlinux使用的RTHAL技术)。
ADEOS (Adaptive Domain Environment for Operating System),提供了一个灵活的环境,可以在多个操作系统之间或单个OS的多个实例之间共享硬件资源,从而使多个优先级域可以同时存在于同一硬件上。早期在xenomai 2上使用。
2005年6月17日,Philippe Gerum发布用于Linux内核的I-pipe,I-pipe基于ADEOS,但是I-pipe更精简,并且只处理中断,xenomai3使用I-pipe和后来改进的dovetail。
Xenomai 4採用了I-pipe的後繼者Dovetail
Xenomai 編譯與開發工具
目前Xenomai 4以EVL core取代Cobalt,以Dovetail取代I-pipe,但EVL Core仍不穩定 有人是使用Xenomi 3.2的colbalt加上dovetail參考此處
Xenomai Programming
Tunables
Tunables(可調參數)是一種用以設定系統的組態值(例如可用以調整記憶體heap)或是控制系統執行階段的行為(例如設定Verbosity Level的數值改變log資料的詳細度)的變數。
有些Tunables又被稱為Configuration Tunables(組態可調參數), 它們可以在應用程式比較前面的執行的程式碼進行更新,直到系統開始初化核心資料結構與啟動服務後,就變成唯讀。
另一些Tunables則被稱為執行階段可調參數,可以在應用程式執行時的任意時間進行更改。
要存取configuration 與runtime tunable當前的數值可以透過以下的API(定義在xenomai/tunables.h裡的巨集)進行:
{get/set}_config_tunable(name)
{get/set}_runtime_tunable(name)
下面是設定並印出verbosity_level這個runtime tunable數值的例子:
#include <stdio.h>
#include <xenomai/tunables.h>
set_runtime_tunable(verbosity_level, 1);
printf("verbosity_level=%d\n", get_runtime_tunable(verbosity_level));
Configuration tunable也可以透過命令列選項進行選項設定,同時要注意的是命令列選項的優先層級高於set_config_tunable()。
Configuration tunables
| NAME | DESCRIPTION | DEFAULT |
|---|---|---|
| cpu_affinity | same as –cpu-affinity option | any online CPU |
| no_mlock | same as –no-mlock option | off |
| no_sanity | same as –no-sanity option | !CONFIG_XENO_SANITY |
| no_registry | same as –no-registry option | off (i.e. enabled) |
| mem_pool_size | same as –mem-pool-size option | 1Mb |
| session_label | same as –session option | none (i.e. anonymous) |
| registry_root | same as –registry-root option | CONFIG_XENO_REGISTRY_ROOT |
| shared_registry | same as –shared-registry option | off (i.e. private) |
Runtime tunables
| NAME | DESCRIPTION | DEFAULT |
|---|---|---|
| verbosity_level | same as –verbose option | 1 |
| trace_level | same as –trace option | 0 |
開發者也可以自訂tunable可調參數(使用define_{config/runtime}_tunable(name)與read_{config/runtime}_tunable(name) ),或是覆載(Overriding)既有的tunable的值,詳細內容可參考官方的說明文件
Entry Point
程式還是和一般的C/C++程式相同,都是從main()開始執行,但視程式所要使用的API,必須透過自動(Automatic)或手動(Manual)設定好對應的啟動程序(Bootstrap)。自動的啟動程序是透過編譯器參數xeno-config –ldflags來完成的,例如使用xeno-config –posix –alchemy –ldflags來設定程式要使用posix及alchemy API,有了這些設定之後,Xenomai 3的函式庫將會負責完成適切的啟動程序。開發者除了可以透過編譯器參數來設定自動啟動程序外,也可以透過程式碼來自行完成啟動,這種做法則稱為手動啟動。選擇使用手動啟動程序的話,必須使用xeno-config –ldflags –no-auto-init編譯器參數來關閉自動啟動程序,並且在程式中必須透過對xenomai_init(&argc, &argv)的呼叫來完成啟動程序的設定,詳細內容亦可參考官方文件。
啟動程式時的命令列引數 (Command Line Arguments)
啟動程式時的命令列引數在自動啟動程序(Automatic Bootstrap)模式下,Xenomai將會在啟動完成後將命令列引數交付給main()函式使用。但在手動啟動程序下,
If the automatic bootstrap mode is used, the application directly receives the set of command line switches passed on invocation in the main() routine, expunged from the Xenomai 3 standard options.